
“季华实验室进校园”是季华实验室线上科普账号,我们聚焦前沿科技,发布系列科普推送,关注我们,带你指尖触达科学世界。
机器人的“顶流们”,最近都忙了些啥?
有的在擂台上“拳拳到铁”,即使被一拳打中身体,还能稳稳站住:

机器人拳击大赛,图片来源:央视新闻
有的在马拉松赛道稳稳跑完了21公里的赛程,仅用时2小时40分钟:

人形机器人半程马拉松赛,图片来源:央视新闻
有的化身挑山工,扛着几十公斤的物品在泰山上爬山,走得比人还快:

泰山“智能挑夫”机器狗亮相,图片来源:央视新闻
这些场景里,机器人没有人类的骨骼、肌肉和神经,却能展现出堪比人类的精准性、持久性和稳定性。
这背后的核心技术就是:伺服驱动系统。它充当了机器人的“神经与肌肉”,通过接收指令、精确驱动并实时反馈调整,从而完成这一切高难度动作。
现在,我们来谈一谈这个让机器人“又稳又能打”的核心——负责动作执行的伺服驱动系统。

机器人抓取物品,图片来源:网络
01
要理解机器人的动作执行,我们可以从日常生活中最常见的电机开始讲起。
洗衣机、空调、电风扇、电吹风、电动剃须刀等日用电器都少不了电机。
简单来说,电机是一种将电能转换为机械能的设备。它们的核心任务很简单:通电就转,断电就停。这类普通电机无法精确控制自己转了多少圈、转速多快,更没法让自己停在某个特定角度。
比如电风扇里的电机,只要通电就能带动叶片旋转,调节档位就能改变转速,能够满足“吹风”基本需求。但当你关掉电风扇开关时,叶片不会立刻停止转动,而是会因为惯性继续旋转几圈才慢慢停下;若是想让叶片精准停留在90度角的位置,普通电机更是“爱莫能助”——它要么转过头了,要么没转到位,根本无法实现“随叫随停”的精准控制。

普通电机无法实现“随叫随停”的精准控制,风扇关机后叶片还会转几圈,图片来源:AI生成
对于机器人来说,这样的普通电机显然是远远不够的。
机器人的每个动作,例如稳健行走、精准抓取、快速出拳,都要求动力系统能够实现“指哪打哪”的极高精准度。这就需要一套更高级的系统,能实时监测、调整,确保动作毫厘不差——这便是采用了闭环控制的伺服系统。
02

“伺服”二字源于英文“Servo”的音译,读起来拗口,但这两个字又很贴切,“伺”就是“随叫随到”,“服”就是“听话照做”,合起来非常形象地揭示了伺服系统的核心特质:能够紧密跟随、快速响应控制信号的指令而执行动作。
伺服系统之所以能让机器人精准执行动作,核心在于“闭环”,即“下达指令→执行→反馈→调整”的循环。这个过程依赖于这些关键角色的精密配合:
机器人控制器(大脑):负责高级决策和运动规划。它决定“机械臂要移动到某个点”或“腿要抬多高”,并将这个宏观指令下达。
伺服驱动器(小脑/神经中枢):作为系统的运动指挥中心,它接收来自“大脑”的指令,并分解为伺服电机能理解的详细动作命令(如电流、速度参数);同时实时接收编码器的反馈信号,快速计算并调整输出,确保动作精准。
伺服电机(肌肉):作为系统的运动执行者,负责将驱动器输出的电信号精确转化为转矩和转速,输出力量与速度,驱动负载运动。
编码器(感官神经):作为系统的反馈元件,通常内置于伺服电机后端。它像是机器的“本体感觉”,持续监测电机转子的实际位置、速度等物理量,并实时反馈给伺服驱动器。
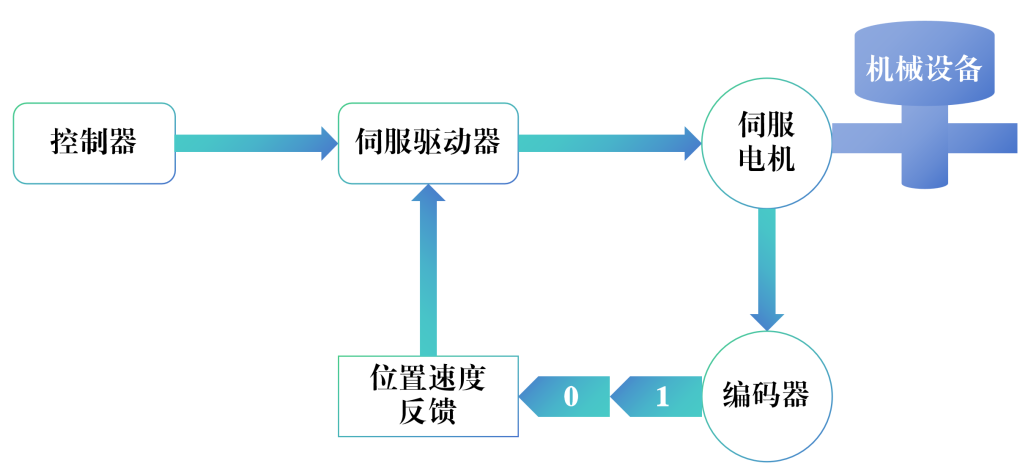
伺服系统组成原理框图,图片来源:自己做的
闭环控制也叫反馈控制,假如机器人要将机械臂旋转90度,一个闭环控制的典型过程如下:
1
下达指令:机器人控制器(大脑)命令“机械臂旋转90度”。
2
分解指令并执行:伺服驱动器(小脑)收到命令,立即驱动伺服电机(肌肉)开始转动。
3
实时反馈:编码器(感官神经)在整个运动过程中,以极高频率连续反馈实际位置信息,“报告,已转动80度!”
4
调整纠偏:伺服驱动器(小脑)不断比较“目标位置”和“反馈位置”的偏差。通过比较“目标90度”和“实际80度”,发现还差10度,立刻微调输出给伺服电机的信号,直到机械臂精确停在90度。
这个过程在毫秒级内循环往复,确保了极高的精准性,给人的感受就是“指哪打哪”。
03
现在,你大概已经明白伺服系统是如何让机器人“指哪打哪”的。
不过,当机器人的任务从简单的“旋转90度”升级为拳击、马拉松等需要爆发力、耐力和动态平衡的复杂动作时,一切就变得完全不同了。这些高难度挑战,最终会落到驱动它们的物理关节上,对伺服系统的性能、体积和集成度提出了近乎极致的需求。

半程马拉松赛第一名天工Ultra的跑步测试,图片来源:央视新闻
这些关节模组的数量非常多,在一台四足机器人上通常需要12-16个,而在人形机器人上则高达28-42个。正因如此,仅关节模组一项,其成本可占整机成本的40%-50%。关节模组远非一个简单的部件,它是机器人的动力心脏与运动神经——它直接决定了机器人是否能跳得高、跑得稳、打得准,是整机性能和可靠性的最关键瓶颈。
高爆发力:瞬间输出巨大扭矩,实现快速启动、跳跃与冲击; 高功率密度:在极其有限的空间内,提供持续强劲的动力; 智能化:不仅要听话地动,更要能感知环境并智能协同,实现精准力控、安全容错。
04
面对上述要求,传统的“伺服电机+减速器+驱动器”分体式方案显得笨重、迟缓且控制复杂。
季华实验室精密驱动与智能控制团队通过正向研发,推出了高性能一体化关节模组,将“驱动-传动-传感-控制”深度集成,为机器人打造了真正强劲而智能的“超强关节”。
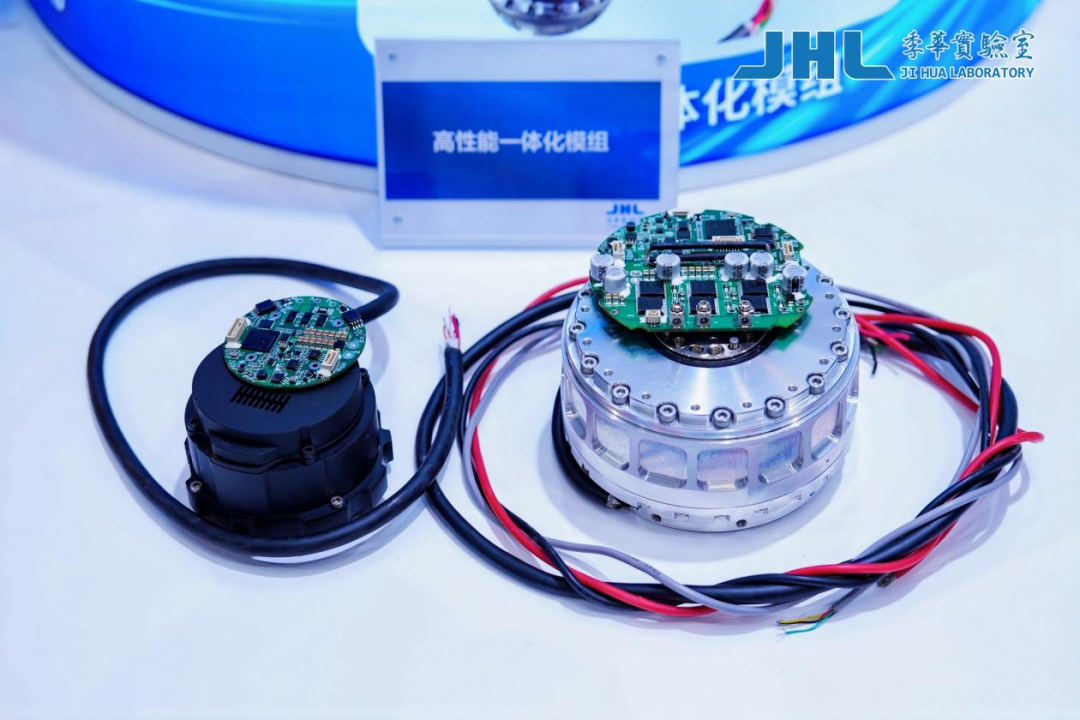
高性能一体化模组,图片来源:季华实验室
我们的解决方案具备以下核心优势:
高度集成,轻量化设计:将无框力矩电机、精密减速器、双编码器、伺服驱动器及制动器深度融合为一个紧凑单元。通过轻量化材料与结构拓扑优化,模组体积缩减30%,重量降低40%,极大释放了机器人的结构空间与负载能力。
极限性能,高动态响应:基于高功率密度正向设计与先进热管理技术,模组能持续输出强劲动力,旋转关节峰值扭矩高达390Nm。同时,借助高带宽自适应控制算法,实现了毫秒级动态响应与±0.01°的极高定位精度,让机器人的每一个动作都既快又准。
内置智能,安全可靠:模组核心集成了分布式智能算法,赋予单个关节“反射弧”式的快速响应与多关节自主协同决策能力。结合多层次安全冗余架构,确保了在突发冲击或部件故障时,机器人能保持运动连续性并安全停机,显著提升了在动态环境中的生存与工作能力。
与之协同的,是我们自主研发的“动力心脏”——高功率密度微型伺服驱动器。它体积小巧却拥有惊人爆发力,峰值功率达6.0kW,并具备6kHz高带宽电流环,为关节模组提供精准、洁净的“能量血液”,共同构成了机器人稳定且强悍的运动执行核心。
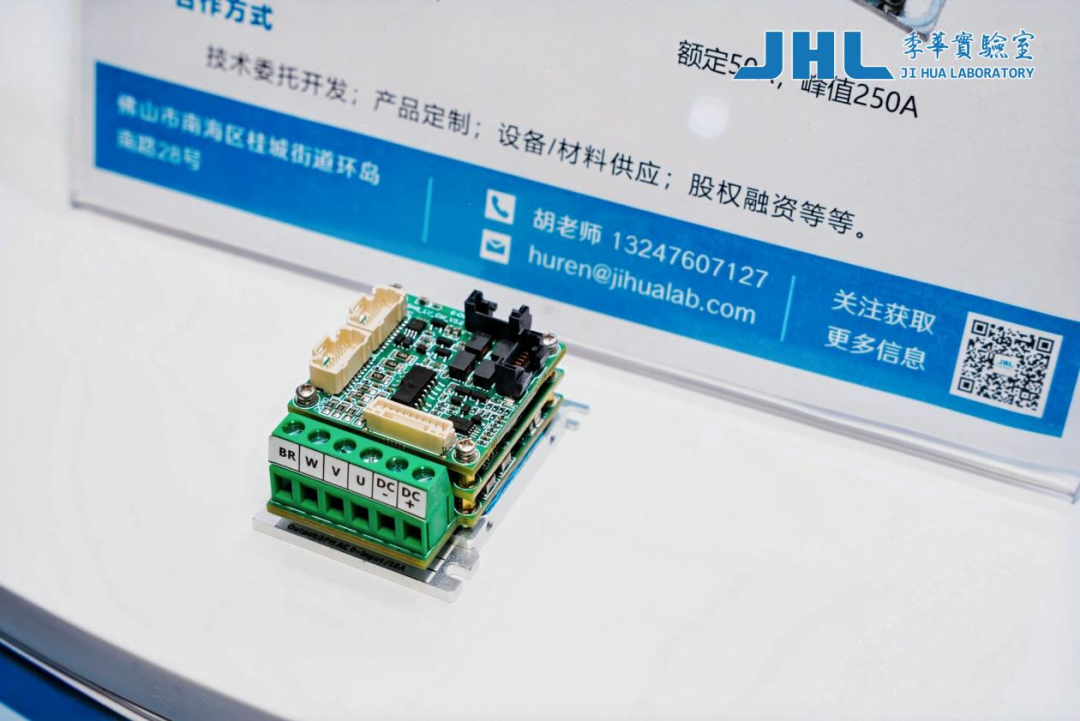
高功率密度微型伺服驱动器,图片来源:季华实验室
这款高度集成的高性能一体化关节模组,提供了一个小巧、强劲且智能的综合解决方案,成为了应对机器人复杂运动挑战的核心硬件,目前已成功应用于各类机器人系统。

机器狗轻松应对复杂运动,图片来源网络
结语
如果说深度相机等传感器赋予了机器人感知世界的双眼,可以说伺服系统是驱动机器人行动的骨骼与肌肉。没有前者,机器人会盲目行动;没有后者,再精准的感知也只能原地空想。
从擂台上的灵活闪避到泰山上的稳健负重,从后空翻到扭秧歌,机器人每一个令人惊叹的动作背后,正是这套高度集成、性能卓越的一体化关节模组与伺服系统,在提供着最根本的动力支撑。
进化从未停止。一体化关节等技术的突破,正让机器的运动从僵硬的程式化动作,趋向拥有柔性与智能的协同;让硬邦邦的金属关节,有了堪比人类肌肉的柔性。那些曾只存在于科幻作品中的场景,如今正凭借这些核心部件的进步,加速照进我们的现实。
Science Technology
撰稿:
邓锦祥、詹弋 季华实验室机器人工程研究部
赵令铵 季华实验室知识产权处
往期回顾(点击图片阅读)

欢迎关注